Astro
Minimal · Lightweight · Intelligent | Open-Source Compact Autonomous Exploration Drone

Abstract
Astro is an open-source compact autonomous exploration drone weighing only 880g. Through a deeply optimized modular architecture and extreme weight reduction techniques, it integrates high-performance autonomous flight capabilities into a palm-sized form factor. This document details its system architecture, core technical features, and engineering design.
1. System Weight Analysis
Total weight of 880g, utilizing a four-module assembly design for highly integrated space utilization and flexible functional expansion.
| Module | Weight | Share | Description |
|---|---|---|---|
| 🔋 Battery Assembly | 430g | 48.9% | Custom 6S 18650 battery pack, high-efficiency long endurance |
| 🧠 Compute Assembly | 170g | 19.3% | Deeply customized miniature Orin NX computing platform |
| 👁️ Sensor Assembly | 140g | 15.9% | Hot-swappable variable module, multi-scenario adaptable |
| ⚙️ Power Base | 140g | 15.9% | Carbon fiber plate + flight controller + motor system |
| Total | 880g | 100% | - |

2. Extreme Weight Reduction
Through deep electromechanical optimization of core components, an uncompromising lightweight design is achieved without sacrificing performance.
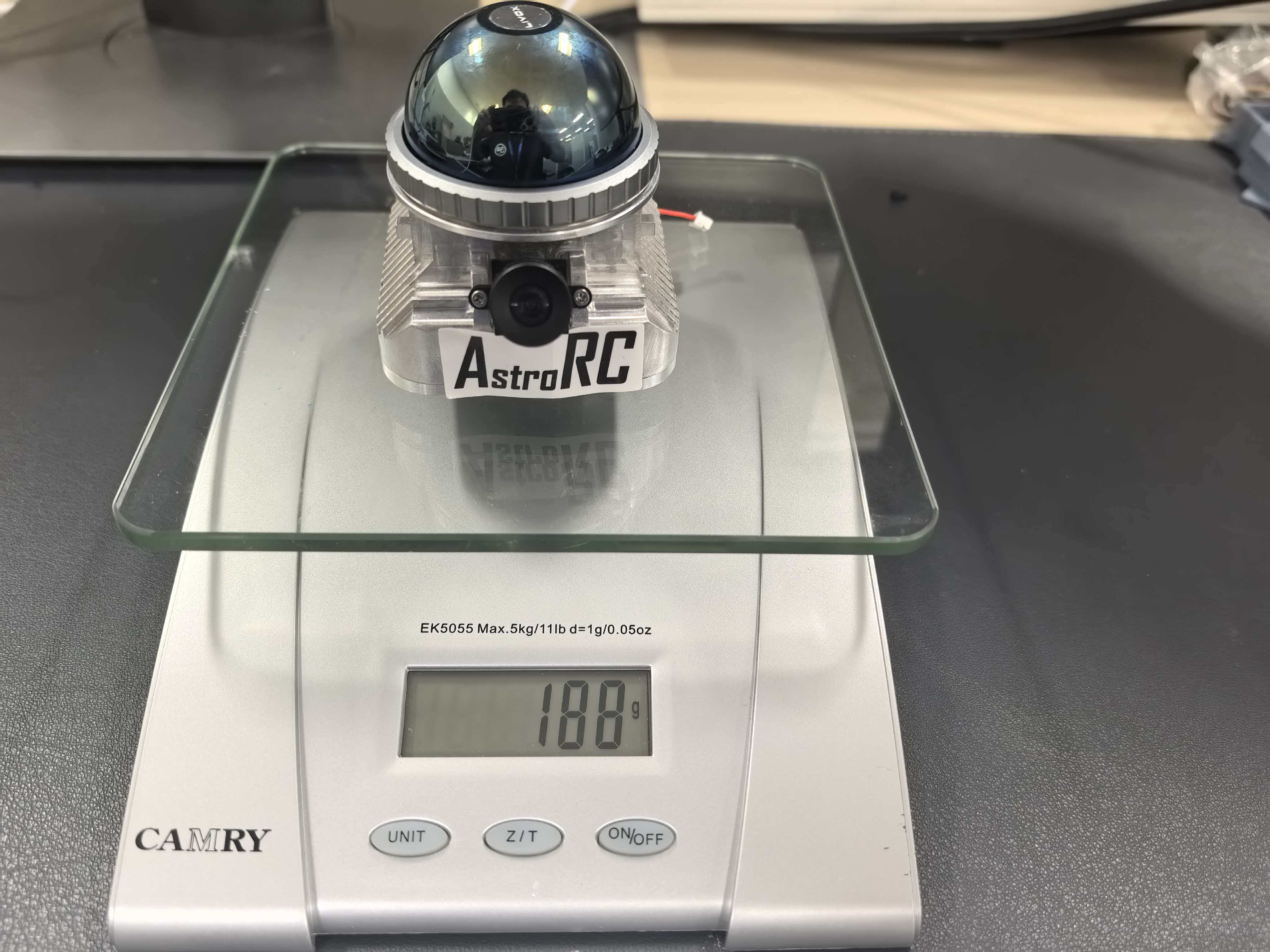
2.1 LiDAR Weight Reduction
The standard Livox Mid360 undergoes deep modification — removing redundant enclosures and interfaces for significant weight savings. The optimized module drastically reduces gimbal payload and improves overall dynamic response.
2.2 Compute Miniaturization
The bulky stock carrier is replaced by a compact custom Orin NX motherboard, paired with a lightweight high-pressure cooling fan to sustain peak compute under load.
- Miniature custom motherboard design
- Efficient active cooling system
- Dual-antenna robust communication
- Sustained stable compute output

3. Precision Assembly
A three-stage progressive build, from base airframe to a fully integrated high-performance system.

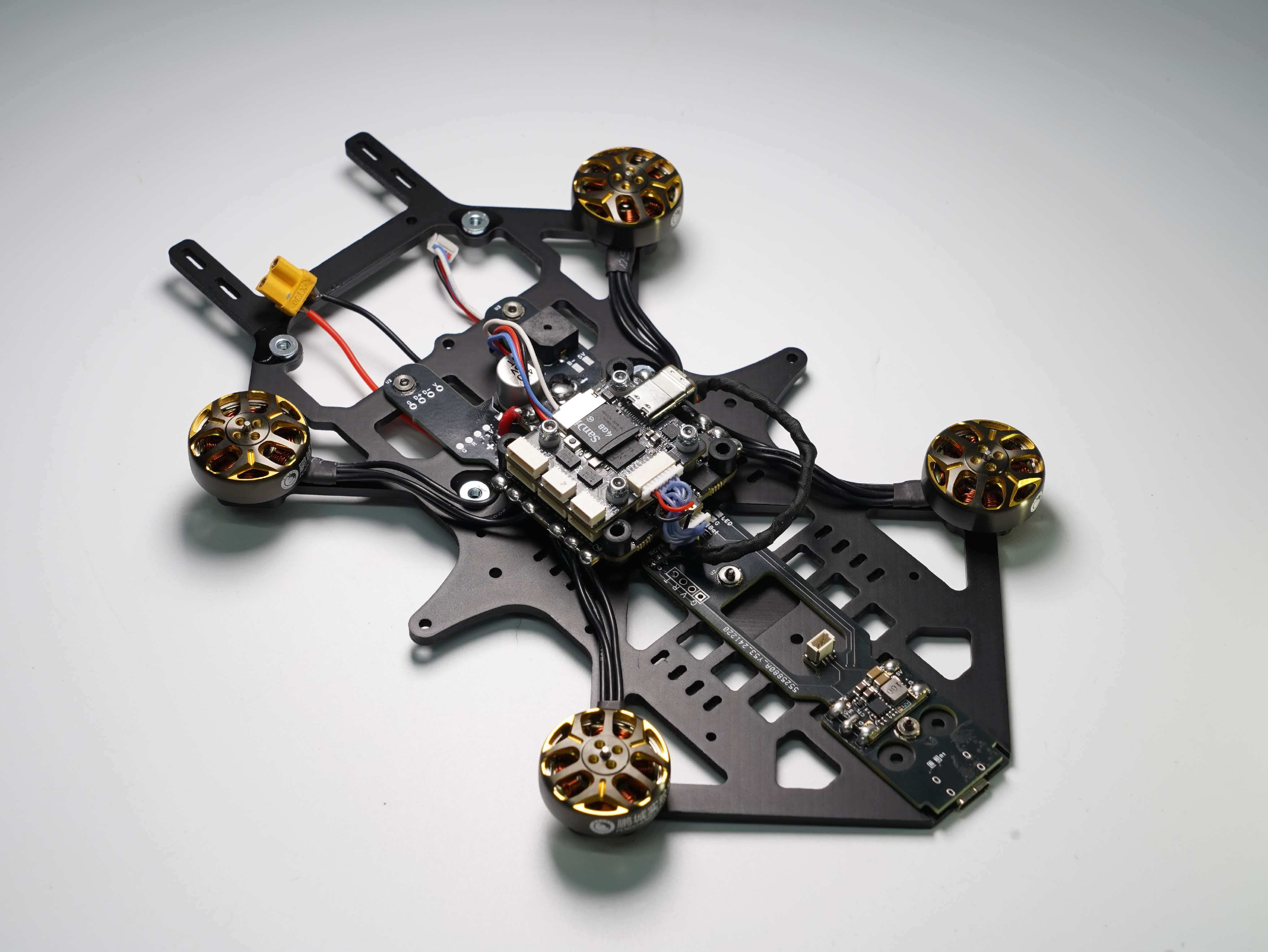
Base Module Integration
Lightweight hollow frame + quad-rotor motors + spherical camera
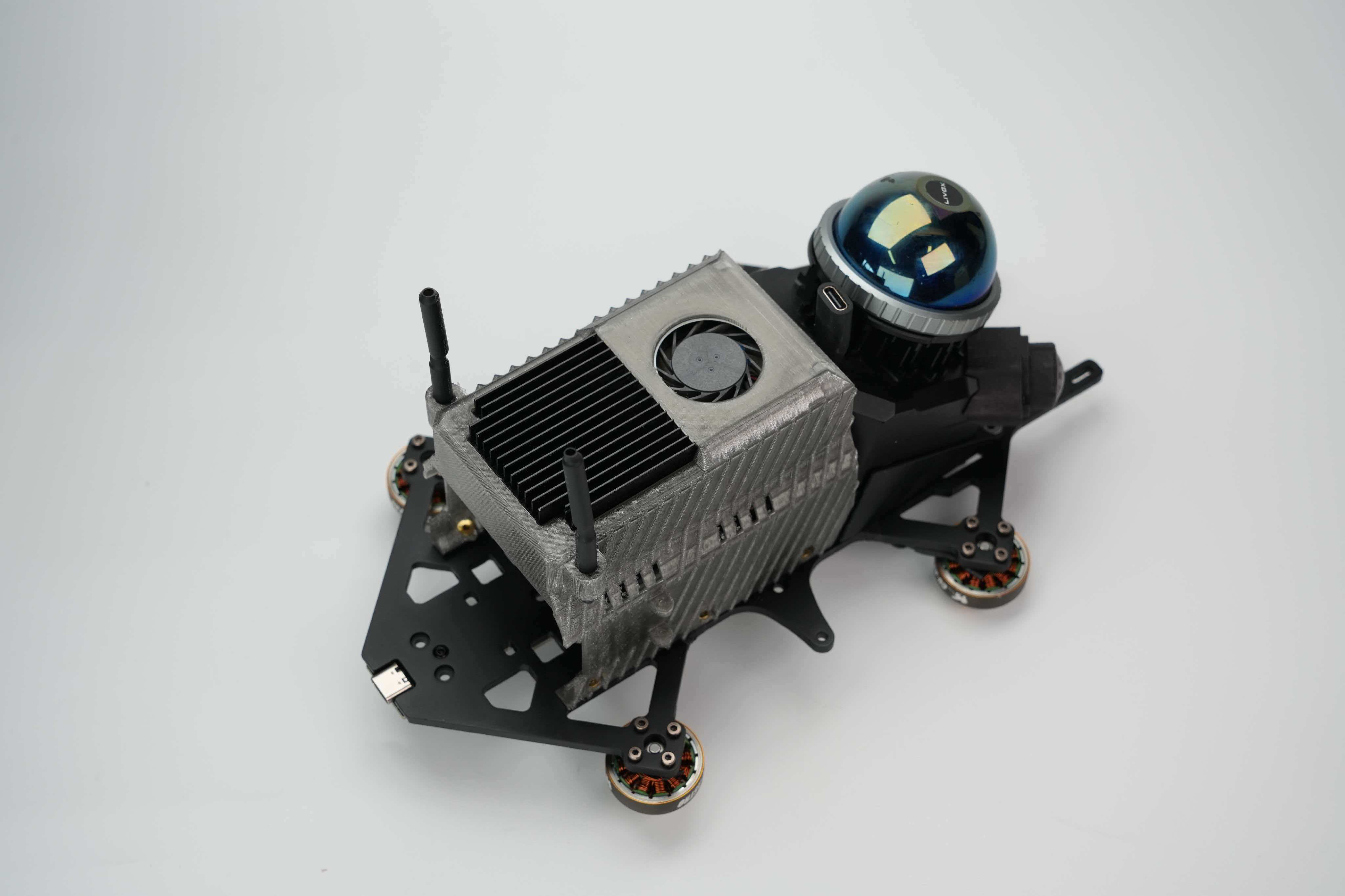
Performance Module Expansion
Heatsink + active fan cooling + dual-antenna wireless communication

Precision Connection Details
Modular cable routing for efficient power and data transmission
4. Variable Sensor Modules
The 140 g sensor assembly hot-swaps in seconds, adapting the perception stack to mission-specific requirements.

Mode 1: Wide-Field Exploration
Configuration: Lightened Mid360 + dual fisheye lenses
Features: Integrated USB virtual-NIC output; suited to large-scale perception and mapping.

Mode 2: High-Resolution Inspection
Configuration: Lightened Mid360 + wide-angle camera
Features: High-resolution image capture for close inspection and fine-feature recognition.
5. Patent-Grade Architecture
A purpose-built mechanical layout delivers stability and reliability within a minimal envelope.

🏗️ Highly Integrated Layout
Flight drive mechanisms and enclosure are mounted on opposite sides of a rectangular plate, drastically reducing overall dimensions.
⚡ Vertical Power Hub
The power distribution board adopts a top-to-bottom vertical layout, saving space while providing efficient power distribution.
🔭 Optimal Detection Angle
LiDAR and camera are integrated on a tilted mounting plate, significantly expanding the detection field of view.